آسانسور الکترو صنعت
سرویس و نگهداری و تعمیر انواع آسانسور های خانگی و اداری و تجاری...آسانسور الکترو صنعت
سرویس و نگهداری و تعمیر انواع آسانسور های خانگی و اداری و تجاری...دربهای آسانسور
آسانسور ها به دلیل حمل و نقل انسان ها در بین طبقات باید از ایمنی های لازم برخوردار باشند که می توانید این ایمنی را در دربهای آسانسور تا ما بقی اجزاء وقطعات آسانسور اعمال کرد که در این مقاله قصد داریم در مورد درب های آسانسور و مشخصات آنها صحبت کنیم.
مشخصات انواع دربهای آسانسور

بسته به هر حالت خاصی ، باید مناسبترین نوع در کابین و در راهرو استفادهشود . انتخاب بستگی به نوع آسانسور و بار اسمی آن دارد . کارآمد ترین در نوعی استکه دارای زمان باز شدن کمتری باشد و عرضیکه انتقال همزمان مسافرین را اجازه بدهد.
درهای لولایی آسانسور
درب تکه لته اغلب به عنوان دربطبقه در آسانسورهای کوچک مسافربر در منازل جائیکه ترافیک خیلی کم است کاربرد دارداین نوع فضای اضافی را برای بازشدن لته نیاز دارد و بطور دستی عمل می شود و هر دوزمان بازشدن و بسته شدن نسبتا طولانی است . ترتیب معمول به این صورت است که درب بهطور دستی باز می شود و بسته شدن آن به وسیله یک وسیله مخصوص بستن درب صورت می گیردتا از ماندن و کوبیده شدن جلوگیری شود.
درهای کشویی افقی آسانسور
امروزه این نوع درب هابیشتر استفاده میشوند و مزایایی ازقبیل بازشدن سریع و بی صدا بودن در مقایسه باانواع دیگر و راحتی عمل را دارند.طبقه بندی آنها به قرار زیر است:1-دربتکه لته ، چپ بازشو یا راست شو2- درب کنار باز شو ، دو یا سه سرعت چندلته
3- درب وسط بازشو تک سرعته4- در با لته های متعدد
درهای کشویی افقی آسانسور
امروزه این نوع درب هابیشتر استفاده میشوند و مزایایی ازقبیل بازشدن سریع و بی صدا بودن در مقایسه باانواع دیگر و راحتی عمل را دارند.طبقه بندی آنها به قرار زیر است:1-دربتکه لته ، چپ بازشو یا راست شو2- درب کنار باز شو ، دو یا سه سرعت چندلته
3- درب وسط بازشو تک سرعته4- در با لته های متعدد
سرویس و نگهداری آسانسور غرب تهران
آماده سازی چاهک آسانسور
در زمان طراحی آسانسورهای کششی می بایست فضایی را برای چاهک آسانسور در نظر گرفت. در زمان بازرسی آسانسورباید به این نکته توجه کرد که چاهک آسانسور یکی از کاربردی ترین فضاهای آسانسور می باشد .
ابعاد چاهک آسانسورها بر اساس ظرفیت آسانسور تعیین می شود و لذا پس از انتخاب آسانسور اندازه های شاقول شده مورد نیاز آسانسورها توسط شرکت فروشنده آسانسور ارائه و بر اساس آن باید چاهکها ساخته شود . فقط در زمانی که چاهک قبلاً ساخته شده است باید شرایطی فراهم شود تا نصاب آسانسور با اندازه گیری دقیق نقشه های اجرائی را بر اساس شرایط موجود طراحی نماید .
-دیوارکشی اطراف چاهک:
الف: سه طرف چاهک (سمت راست - روبرو –سمت چپ) می بایستی بوسیله دیوارکشی از کف تمام شده اولین توقف تا اطاقک موتورخانه بر روی پشت بام اجرا گردد.


ممکن است دیوارکشی با یکی از روش های زیر برحسب شرایط ساختمان انجام پذیرد:
1. ورق کشی: که به تناسب فضا از ورق های فلزی _ یا پانل های گچی استفاده می شود
2. رابتیس بندی: با استفاده از تورهای فلزی مخصوص و اندود کاری روی آن
3. آجر کشی
ب: انجام اندود دیوار از طرف داخل چاهک بوسیله سیمان –یا خاک و گچ
ج : اجرای روشنایی داخل چاهک طبق دستورالعمل مربوطه باید انجام شود.
مرحله 1) آماده سازی کف چاله آسانسور :
الف: جهت نصب آسانسور ارتفاع مورد نیاز از کف چاله تا سطح کف سازی شود یعنی از محل اولین توقف آسانسور قبل از بتون ریزی کف چاله باید فضایی در نظر گرفت ب:جهت اجرای سکوهای ضربه گیر طبق نقشه های اجرای آرماتورهای انتظار جهت سکوهای ضربه گیر در فونداسیون مذکور پیش بینی می شود.
نکته مهم: در این مرحله پیش بینی چاه ارت ضروری است.
جهت چاه ارت (Earth) تا رسیدن به رطوبت لازم زمینی، و وصل کردن سیم مربوطه، می توان از چاه اصلی ساختمان جهت ایجاد چاه ارت استفاده نمود و چنانچه این چاه پیش بینی نشده است، در محل مناسب و نزدیک به آسانسور چاهی ایجاد کرد.
نحوه ورود به شغل نصب و تعمیر آسانسور
شما می توانید این کار را به صورت کاملا تجربی و نزد یک استاد ماهر یاد بگیرید.
برای آموزش حرفه ای در این شغل می توانید پس از گذراندن سال اول دبیرستان وارد شاخه کار و دانش در رشته مربوطه شوید. در این رشته امکان ادامه تحصیل در مقطع کاردانی و کارشناسی نیز وجود دارد. ایران دومین کشور بعد از انگلستان است که رشته دانشگاهی نصب و تعمیر آسانسور را راه اندازی کرده است.
همچنین دوره های آزاد این شغل در آموزشگاه های معتبر زیر نظر سازمان فنی و حرفه ای برگزار می شود که علاقه مندان می توانند در آنها شرکت کنند.
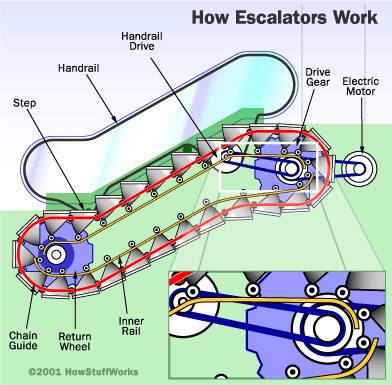
تاریخچه ساخت پله برقی
در سال 1859 ناتان آمیز آمریکاییاولین امتیاز ثبت اختراع را به نام خود تقاضا نمود و عنوان آن را پله های گردان گذاشت شکل این پله ها به صورت مثلث متساوی الاضلاع بود که از طریق آن مسافر روی یک ضلع سوار شده و در انتها پیاده می گردید اما کار بر روی این اختراع و تکمیل آن ادامه یافت تا اینکه در سال 1892 شخصی به نام رنو اختراع خود را در انگلیس تحت عنوان آسانسور با پله های متوالی ثبت کرد اختراع او این نکته را روشن ساخت که دستگیره ها می توانند حذف شوند و توجه به سرعتی در حدود 200 فوت در دقیقه معطوف شد این مقدار از سرعتهایی که هم اکنون به عنوان سرعت استاندارد تلقی می شود بیشتر است همچنانکه موضوع آسانسورهای بالا و پایین بر که امروزه در فروشگاههای مدرن به کار می روند مورد توجه قرار گرفت.طراحی و نصب اولین دستگاه های پله برقی :
طرح درست مانند همه نقاله ها ولی بعد ها شامل گیره هایی شد که قابل کاربرد در گروه های سه تایی که پایین تر از قسمت هدایت کننده و بالاتر از قسمت متحرک بودند ودر نظر گرفت این کار جاگیری بهتر را برای پاها به هنگام بالا رفتن ایجاد کرد اولین پله های برقی برای لذت جویی و سوار شدن نصب می شدند با وسیله ای جدی برای حرکت و جابه جا نمودن مسافرین در سال 1893 یکه پله برقی در شیکاگو برای یک نمایشگاه نصب گردید و بعد از آن نیز در سالهای بعد این پله ها در جاهای دیگر تفریحی و نمایشگاهی استفاده گردید در سال 1911 متروی لندن پله برقی برای حمل نقل آسان مسافران نصب گردید.
ایــنـکــودر ( ENCODER ) چــیـســـت ؟
اینکودر ( ENCODER ) وسیله ای برای اندازه گیری میزان جابجائی از نقطه ای به نقطه دیگر است . این وسیله به اشکال و با میزان دقتهای متفاوتی ساخته می شود . اندازه گیری این جابجائی می تواند حول یک محور به صورت دوران یا اندازه گیری مسیر در طول ، عرض ، ارتفاع و یا تلفیقی از حالات ذکر شده باشد .
اینکودرها از طریق یک وسیله مدرج شده متناسب با نوع حرکت ، که انواع آن توضیح داده می شود و دو سنسور A و B ، دو سیگنال تولید می کنند . این سیگنالها به نام سیگنال سنسور A و سیگنال سنسور B نامیده می شوند و با ثابت بودن وسیله مدرج شده و حرکت سنسورها و یا ثابت بودن سنسورها و حرکت وسیله مدرج شده تولید می شوند . هرچه تعداد سیگنالهای تولید شده در یک فاصله ثابت بیشتر باشد واحد اندازه گیری کوچکتر و در نتیجه دقت اندازه گیری بیشتر می شود .
این سیگنالها به دو شکل آنالوگ و یا دیجیتال تولید می شوند و همانگونه که در شکل 2 مشخص است ( به استثناء سیستم پرچمی FLAG ، اگر مدت زمان یک سیگنال را تا سیگنال بعدی در یک حرکت با سرعت ثابت و تقسیمات 360 درجه در نظر بگیریم ، 180 درجه سطح پائین ( صفر منطقی ) و 180 درجه سطح بالا ( یک منطقی ) می باشند . حال اگر دو سیگنال A و B را با هم مقایسه کنیم شاهد این تقسیمات به چهار منطقه 90 درجه ای خواهیم بود که اختلاف 90 درجه ای این دو سیگنال در هم سطح شدن و پردازش آن می تواند منتهی به تشخیص جهت حرکت شود .
به این ترتیب که اگر سیگنال A اول یک منطقی شود و با اختلاف 90 درجه سیگنال B در سطح یک منطقی قرار گیرد جهت حرکت به یک سو و در صورتی که سیگنال B اول یک منطقی شود و با اختلاف 90 درجه سیگنال A در سطح یک منطقی قرار گیرد ، جهت حرکت مخالف جهت اول تشخیص داده می شود . اینکودرها سیگنال سومی به نام Z دارند که این سیگنال را مرجع ( REFRENC ) می نامند .
اینکودرها بنا به نیاز مصرف برای تولید تعداد سیگنالهای مختلف ساخته می شوند که می توان به انواع یک سیگنال ، 2 سیگنال ، 3 سیگنال و 6 سیگنال اشاره کرد .
نوع 6 سیگنال آن تشکیل شده از سیگنالهای A و B و Z است که قبلاً به آنها اشاره شد . سه سیگنال بعدی سیگنالهای " Aو " Bو " Z هستند که این سیگنالها دقیقاً مخالف سیگنالهای A و B و Z عمل می کنند . به این ترتیب که وقتی سیگنال Aدر سطح منتفی یک قرار دارد سیگنال " Aدر سطح منطقی صفر قرار می گیرد . عملکرد سیگنالهای " Bو " Zنیز همانند سیگنال " Aاست .
رایج ترین نوع اینکودرها که برای اندازه گیری میزان جابجائی در سطح مورد استفاده قرار می گیرد ، سخت افزار ماوس ( mouse ) است که روی اکثر میزها در کنار کامپیوترها دیده می شود برای لمس کردن نحوه عملکرد اینکودرها شما می توانید با بازکردن قاب این دستگاه شاهد دو صفحه مدرج دوار ، دو سنسور نوری و مدار الکترونیکی باشید . با حرکت دادن ماوس در سطح ، گوی زیرین به حرکت درآمده و باعث حرکت صفحه مدرج در میان سنسورها می گردد به همین طریق سیگنالهای A و B تولید می شوند . پردازش این سیگنالها میزان جابجائی حول محور X و Y را تعیین می کند .
سنسورها :
سنسورها انواع گوناگونی دارند که کاربرد هر کدام متفاوت است . از انواع آن می توان سنسورهای تماسی ( سوئیچ های مکانیکی ) غیر تماسی آهنربائی ( MAGNETIC ) و نوری ( OPTICAL ) را نام برد .
سوئیچ های مکانیکی :
سوئیچ های مکانیکی با تماس فعال و یا غیر فعال می شوند مانند سوئیچهائی که در سیستم مدار ایمنی آسانسور و یا شناسائی مورد استفاده قرار می گیرد .
آهنربائی ( MAGNETIC )
سنسور آهنربائی به میدان مغناطیسی حساس است مانند سنسورهائی که برای شناسائی طبقات مورد استفاده قرار می گیرد .
سنسور نوری
این نوع سنسورها از یک فتودیود و یک فتوترانزیستور تشکیل شده اند که اصطلاحاً به فتودیود فرستنده و به فتوترانزیستور گیرنده می گویند این سنسور با عبور از روی وسیله مدرج و قطع و وصل شدن ارتباط بین گیرنده و فرستنده سیگنال تولید می کند .
وسیله مدرج :
وسیله مدرج تعیین کننده تعداد سیگنالهای تولید شده توسط سنسورها است که سه نوع آن به شرح ذیل می باشند :
1. نوار TAPE
2. صفحه دوار
3. پرچم FLAG
1. نوار TAPE
این نوع معمولاً در اینکودرهائی که سنجش اندازه حرکت در طول و یا ارتفاع را بر عهده دارند تعبیه می گردد . در این روش از یک نوار پانچ شده و یا نوار انعکاسی استفاده می شود .
2. صفحه دوار
این نوع معمولاً در اینکودرهائی که سنجش اندازه حرکت در طول و یا ارتفاع را بر عهده دارند تعبیه می گردد . در این روش از یک نوار پانچ شده و یا نوار انعکاسی استفاده می شود .
3. پرچم
FLAG در این روش با قراردادن پرچمها در محلهای مورد نیاز و عبور سنسور از روی پرچمها ، سیگنال تولید می شود . آلیاژ پرچمها باید از نوعی باشد که سنسورها نسبت به آن حساس باشند برای مثال اگر از سنسورهای حساس به میدان مغناطیسی استفاده می شود باید جنس پرچمها از نوع مگنت ( آهن ربائی ) باشد .
